How to build your own environment in Robosuite
tired of read the source code
How to build your own environment in Robosuite
How to build your own environment in Robosuite
Overview
Robosuite is a highly renowned simulation environment for embodied AI. Numerous projects have been developed based on it, such as Robomimic and MimicGen. Recently, I have been delving deeper into Robosuite because I find it well-suited for my project. Prior to exploring Robosuite, I had also experimented with other simulators and environments, like Sapien and OmniGibson. Each time I start to familiarize myself with a new simulator, the process can be quite challenging and frustrating. Therefore, I am writing this blog to document some useful findings and tips that I discover along the way
how to build your own environment.
First, check the official document. Apparently, you can find it in this page . But when I do as what this page told, I just can not figure out what I am doing. Therefore, I strongly recommend to take a look at those files in *./robosuite/enviroments/manipulation/*. after that you can find there would be 5 functions there for every task respectively, **_load_models, reward, _check_success, reset_internal, _setup_observables**. Just like what has been told in issue#526: 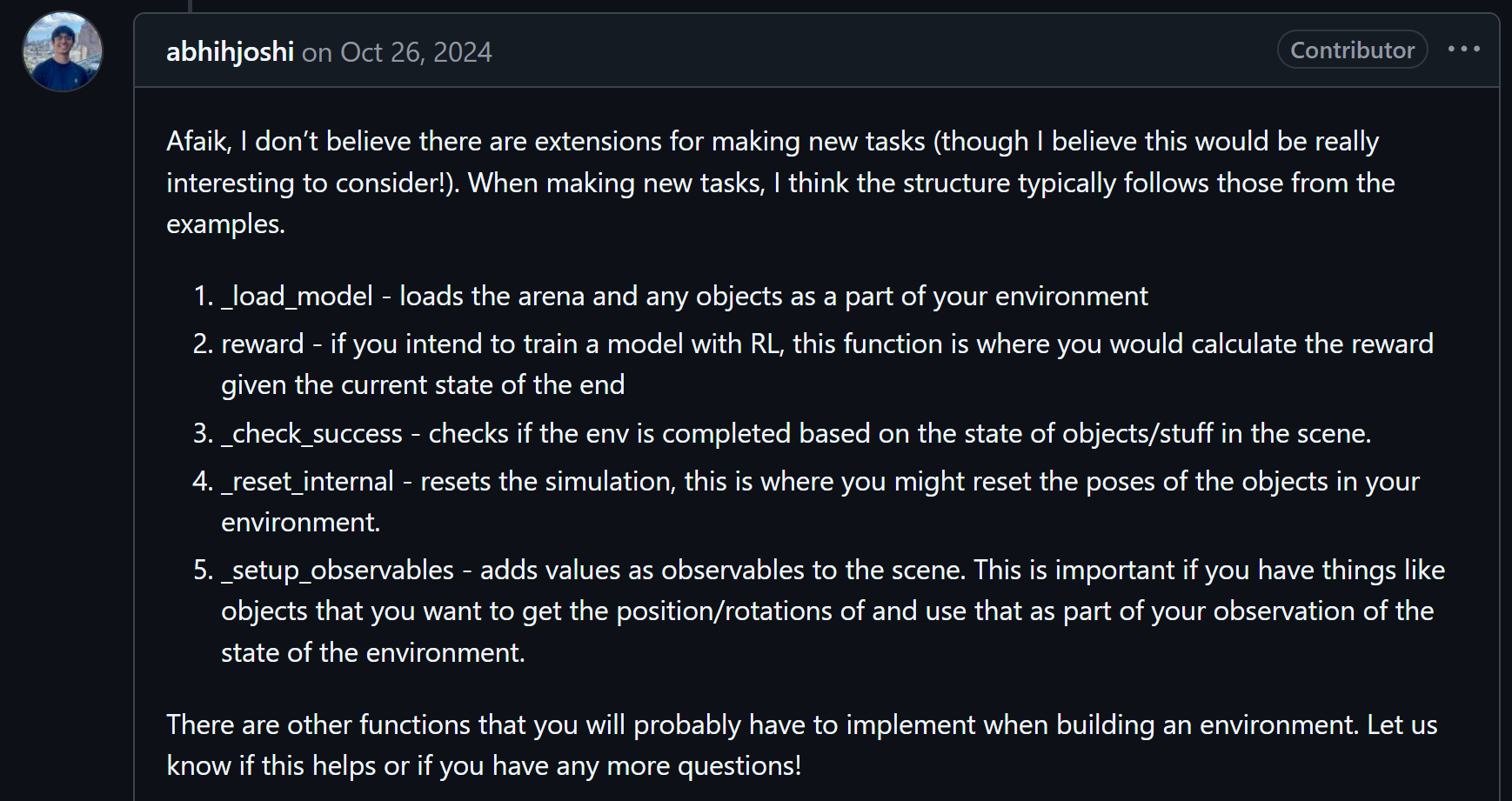 among these 5 functions, the 2 most important ones are _load_models() and _setup_observables. Taking *./robosuite/enviroments/manipulation/lift.py* as an example:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
def _load_model(self):
"""
Loads an xml model, puts it in self.model
"""
super()._load_model()
# Adjust base pose accordingly
xpos = self.robots[0].robot_model.base_xpos_offset["table"](self.table_full_size[0])
self.robots[0].robot_model.set_base_xpos(xpos)
# load model for table top workspace
mujoco_arena = TableArena(
table_full_size=self.table_full_size,
table_friction=self.table_friction,
table_offset=self.table_offset,
)
# Arena always gets set to zero origin
mujoco_arena.set_origin([0, 0, 0])
# initialize objects of interest
tex_attrib = {
"type": "cube",
}
mat_attrib = {
"texrepeat": "1 1",
"specular": "0.4",
"shininess": "0.1",
}
redwood = CustomMaterial(
texture="WoodRed",
tex_name="redwood",
mat_name="redwood_mat",
tex_attrib=tex_attrib,
mat_attrib=mat_attrib,
)
self.cube = BoxObject(
name="cube",
size_min=[0.020, 0.020, 0.020], # [0.015, 0.015, 0.015],
size_max=[0.022, 0.022, 0.022], # [0.018, 0.018, 0.018])
rgba=[1, 0, 0, 1],
material=redwood,
)
# Create placement initializer
if self.placement_initializer is not None:
self.placement_initializer.reset()
self.placement_initializer.add_objects(self.cube)
else:
self.placement_initializer = UniformRandomSampler(
name="ObjectSampler",
mujoco_objects=self.cube,
x_range=[-0.03, 0.03],
y_range=[-0.03, 0.03],
rotation=None,
ensure_object_boundary_in_range=False,
ensure_valid_placement=True,
reference_pos=self.table_offset,
z_offset=0.01,
)
# task includes arena, robot, and objects of interest
self.model = ManipulationTask(
mujoco_arena=mujoco_arena,
mujoco_robots=[robot.robot_model for robot in self.robots],
mujoco_objects=self.cube,
)
To design a different scene, we should change the robot, arena, objects here. Besides, you have to register the task in *./robosuite/__init__.py* by adding a line: from robosuite.environment.manipulation.yourtask import yourtask after that, you can modify the parameters in *./robosuite/demos* or add the name of your task after the --environment.
Summary
Robosuite is a great simulator, but its official tutorial isn’t very beginner-friendly. I hope my blog can help you if you run into difficulties while creating your own environment. At the very least, it should save you some time. I wish I had more time to delve into the details in the future.
This post is licensed under CC BY 4.0 by the author.